Welcome to my blog
A new home for my notes on 3D vision, LiDAR, and geospatial deep learning, migrating from Notion.
Ph.D. research scholar in the GeoAI4Cities Lab, Data Science and Engineering at IISER Bhopal, advised by Dr. Vaibhav Kumar.
I develop deep learning methods for 3D point clouds, LiDAR, and multi-source geospatial data to better understand and plan urban environments.
I am a Ph.D. research scholar in the GeoAI4Cities Lab at Indian Institute of Science Education and Research, Bhopal, advised by Dr. Vaibhav Kumar. My work sits at the intersection of 3D computer vision and geospatial science.
My doctoral research, "LiDAR Point Cloud Perception for Emergency Vehicle Accessibility and Quality-of-Life Mapping in Urban Environments", develops deep learning models for semantic segmentation of mobile LiDAR point clouds, domain adaptation across urban scenes, and the fusion of LiDAR, street-view imagery, and other 2D and 3D geospatial data for applications such as pedestrian-oriented route planning and urban quality-of-life assessment.
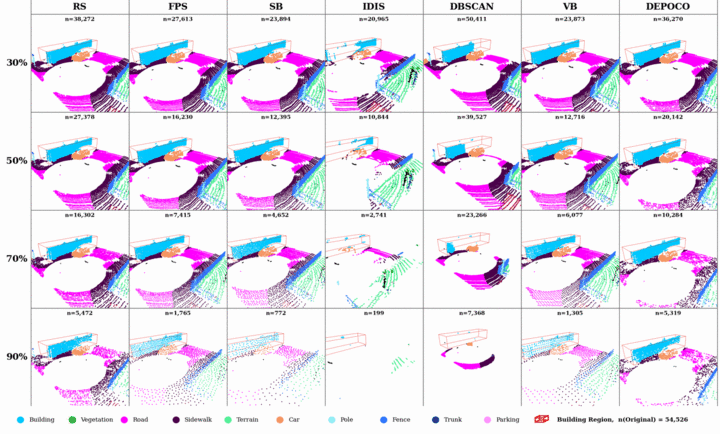 Appl. Intell. · 2026
Appl. Intell. · 2026Pyare Lal Chauhan, Aakash Singh Bais, Vaibhav Kumar
Applied Intelligence, vol. 56, Article 273
Benchmarks how point-cloud subsampling and compression strategies trade off semantic-segmentation accuracy against compute cost for airborne and mobile LiDAR.
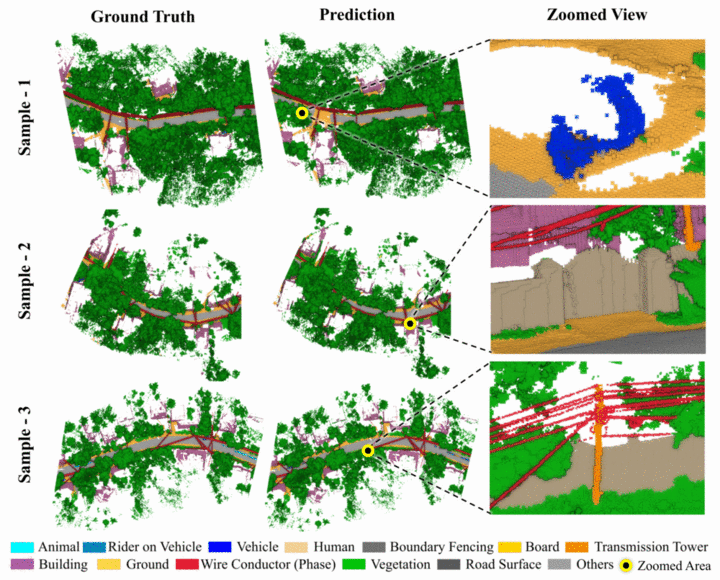 Env. Plan. B · 2026
Env. Plan. B · 2026Vaibhav Kumar, Bharat Lohani, Pyare Lal, Aakash Singh Bais, Aditya
Environment and Planning B: Urban Analytics and City Science
Introduces Ke-MLS, a large-scale labeled mobile-LiDAR dataset of Indian urban streetscapes for point-cloud segmentation research.
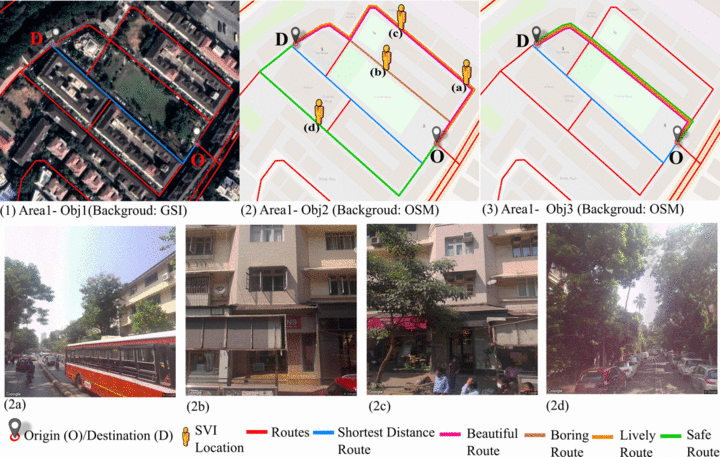 IJAEOG · 2025
IJAEOG · 2025Pyare Lal Chauhan, Tanishq Kumar Baswal, Vaibhav Kumar
International Journal of Applied Earth Observation and Geoinformation, vol. 144, Article 104932
Plans pedestrian routes optimized for human perception (safe, lively, beautiful) by combining street-view imagery with deep learning and spatial data.
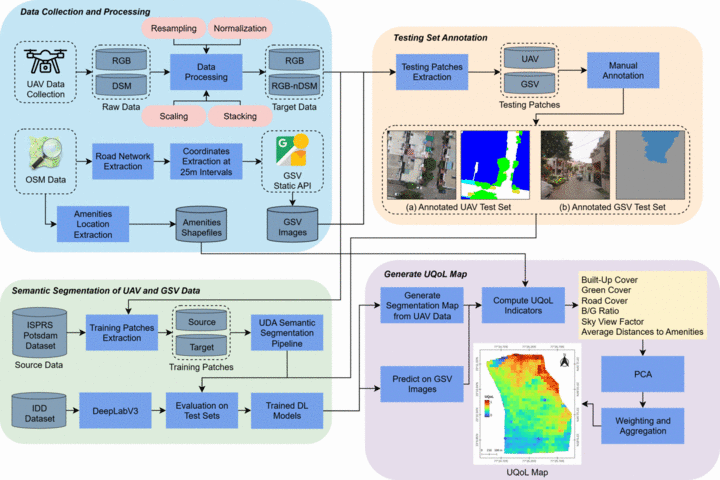 IJAEOG · 2025
IJAEOG · 2025Ayush Dabra, Pyare Lal Chauhan, Vaibhav Kumar
International Journal of Applied Earth Observation and Geoinformation, vol. 144, Article 104838
Fuses multi-source 2D and 3D geospatial data with deep learning to map and assess urban quality of life.
 Neurocomputing · 2025
Neurocomputing · 2025Anurag Nihal*, Pyare Lal*, Vaibhav Kumar
Neurocomputing, Article 131526
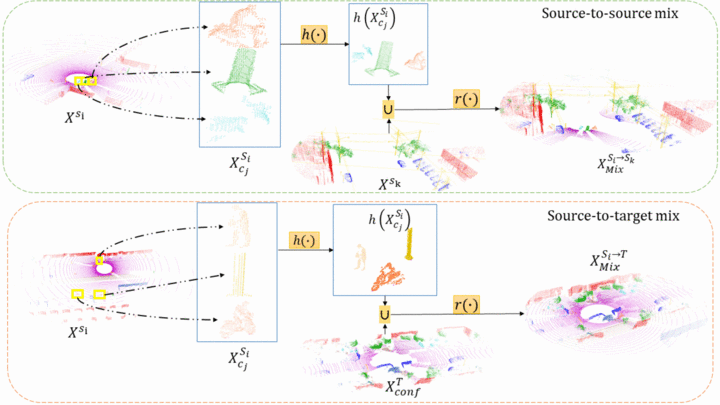
Proposes UMDMix, an unsupervised domain-adaptation method that mixes urban LiDAR domains to transfer semantic segmentation across cities.
 IEEE InGARSS · 2023
IEEE InGARSS · 2023Pyare Lal Chauhan, J. Vijaywargiya, A. M. Ramiya
IEEE India Geoscience and Remote Sensing Symposium (InGARSS)
Examines class imbalance in airborne-LiDAR (ALS) semantic segmentation, comparing RandLA-Net and PointNet++.
* denotes equal contribution.
Co-creator of a large-scale labeled mobile LiDAR dataset for the Indian urban region.
Code for street-view imagery human-perception modeling and pedestrian-oriented route planning (svi_perception).
Benchmark code for subsampling strategies in LiDAR semantic segmentation (LiDAR-Subsampling-Benchmark).
Code for unsupervised domain adaptation in LiDAR semantic segmentation via urban multi-domain mixing (umdmix-uda).
A from-scratch implementation exploring reasoning in large language models (reasoning-from-scratch).
GeoAI4Cities Lab, IISER Bhopal · Advisor: Dr. Vaibhav Kumar
IIST Thiruvananthapuram · Advisor: Dr. A. M. Ramiya
Indian Institute of Soil & Water Conservation (IISWC), Dehradun
Teaching Assistant, IISER Bhopal: Artificial Intelligence (DSE313), Spatial Data Science (DSE416), Accelerated Applied AI, Applied Optimization.
Founder
An early-stage AI venture building applied-intelligence solutions for urban planning, incubated at IISER Bhopal and IISER Pune.
Incubated at the IISER Bhopal (IICE) and IISER Pune (AIC) incubation centres.



Indian Institute of Science Education and Research, Bhopal, Madhya Pradesh
CGPA 9.0

Indian Institute of Space Science and Technology, Thiruvananthapuram, Kerala
CGPA 8.69

SRM University, Chennai, Tamil Nadu
CGPA 9.17
Winner at the IEEE GRSS Student Hackathon, Bangalore.
Top-5 team in the Geospatial Research Hackathon, IIIT Hyderabad.
Selected for the ACM India Anveshan Setu Fellowship.
Travel grant for the IndoML Symposium, IIT Gandhinagar.
A new home for my notes on 3D vision, LiDAR, and geospatial deep learning, migrating from Notion.
I'm always open to discussing research, collaborations, and new opportunities. Feel free to reach out.